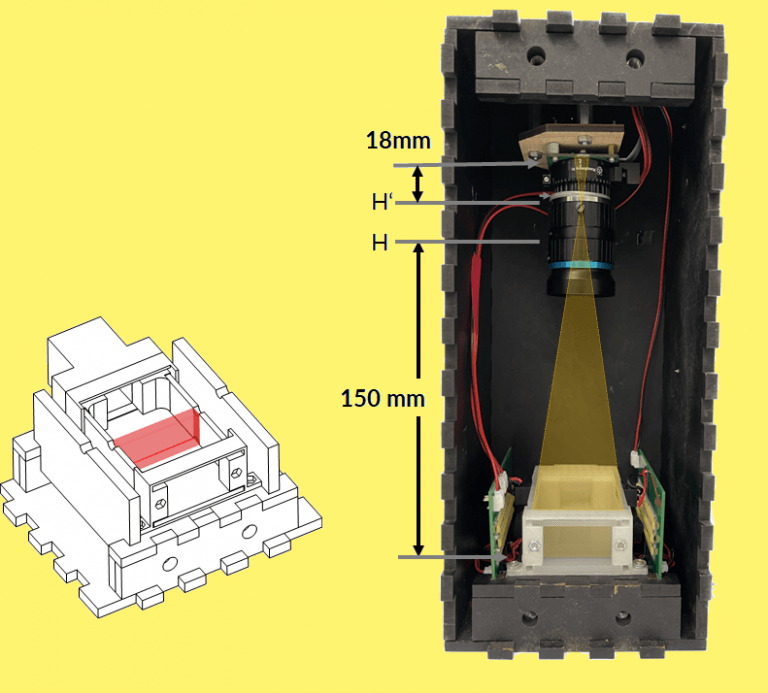
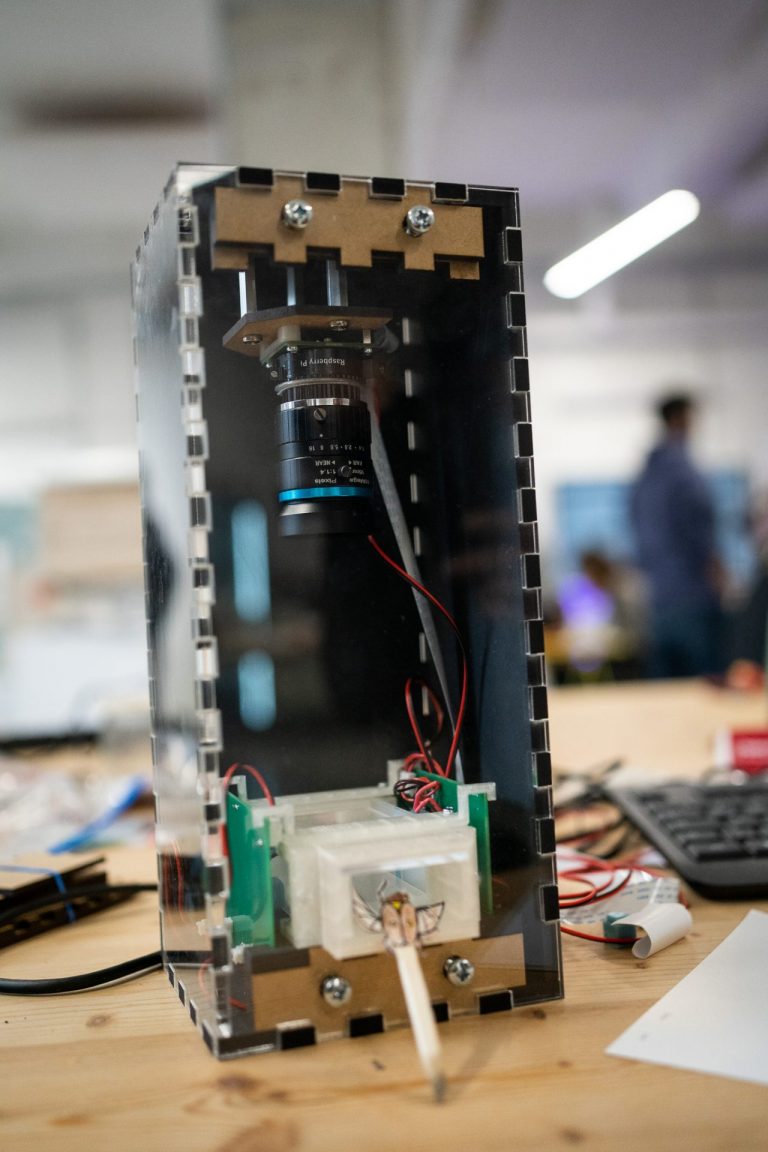
Wir arbeiten zunächst mit einer Raspberry-Pi Kamerakonfiguration: Die Insekten werden von oben fotografiert. Die Aufnahmen mit dieser Kamera müssen eine ausreichend hohe Auflösung besitzen, um charakteristische Details von Insekten, wie z.B. die Behaarung, die Flügelstruktur und die Farbe darauf wiederzugeben, sodass Expert*innen (Entomolog*innen) die Insekten bestimmen können. Sind die Bilder einer Insektenart zugeordnet bezeichnen wir diese als ‚gelabelt‘ und sie können als Grundwahrheit für das Training der KI verwendet werden. In unserem finalen Multisensorsystem kann eine einfache und kostengünstige Kamera zum Einsatz kommen, deren Bilder durch Kombination mit anderen Sensordaten eine zuverlässige Klassifizierung der Insekten ermöglichen. Das ist unser Ziel. Wir arbeiten mit Blitz, denn Insekten krabbeln schnell, zu schnell für die Belichtungszeiten der Raspberry-Pi Kamera. Außerdem beleuchten wir diffus, um Schatten zu vermeiden.